Управляем шаговым двигателем с помощью Arduino UNO и uln2003a
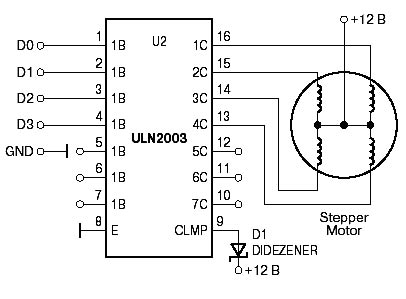
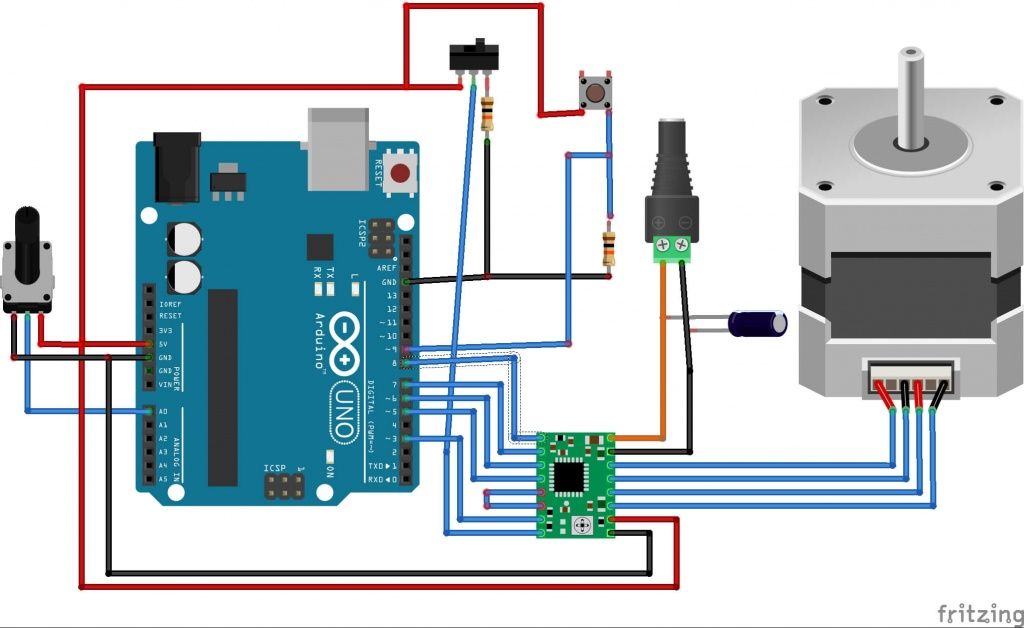
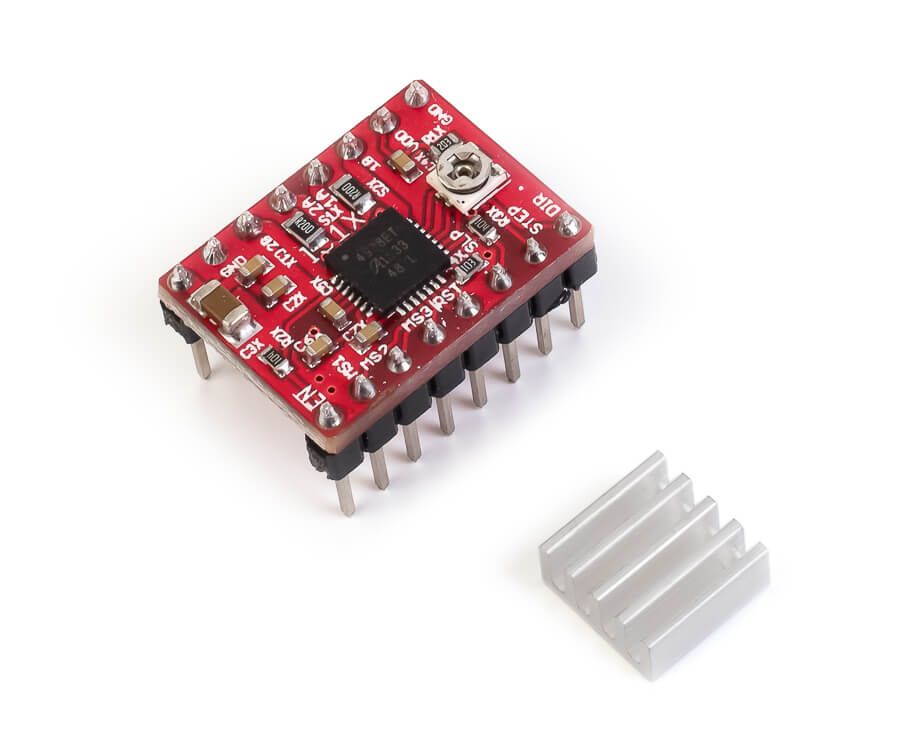
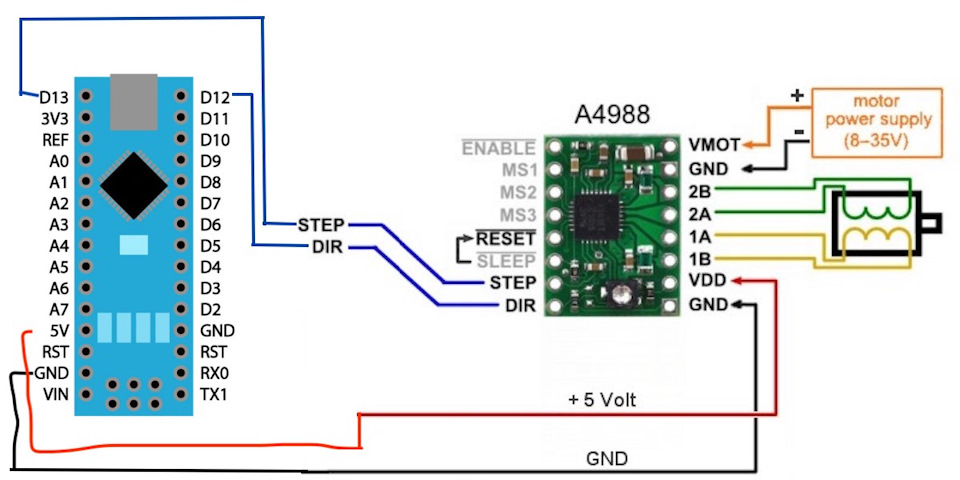
Для подключения шаговых моторов к Arduino нужно использовать драйверы. Очень дешёвые и популярные моторы 28byjv часто продаются вместе со своим драйвером транзисторная сборка ULN , подключить можно к любым 4-м пинам Ардуино и использовать. Для работы с большими шаговиками типа Nema 17 нужно использовать специализированные драйверы, ниже вы найдёте описания и схемы подключения для A, DRV и TMC, драйверы такого формата подключаются и работают практически одинаково, так как разработаны для CNC шилдов и взаимозаменяемы. У этих драйверов нужно настроить ток при помощи крутилки на плате.





")









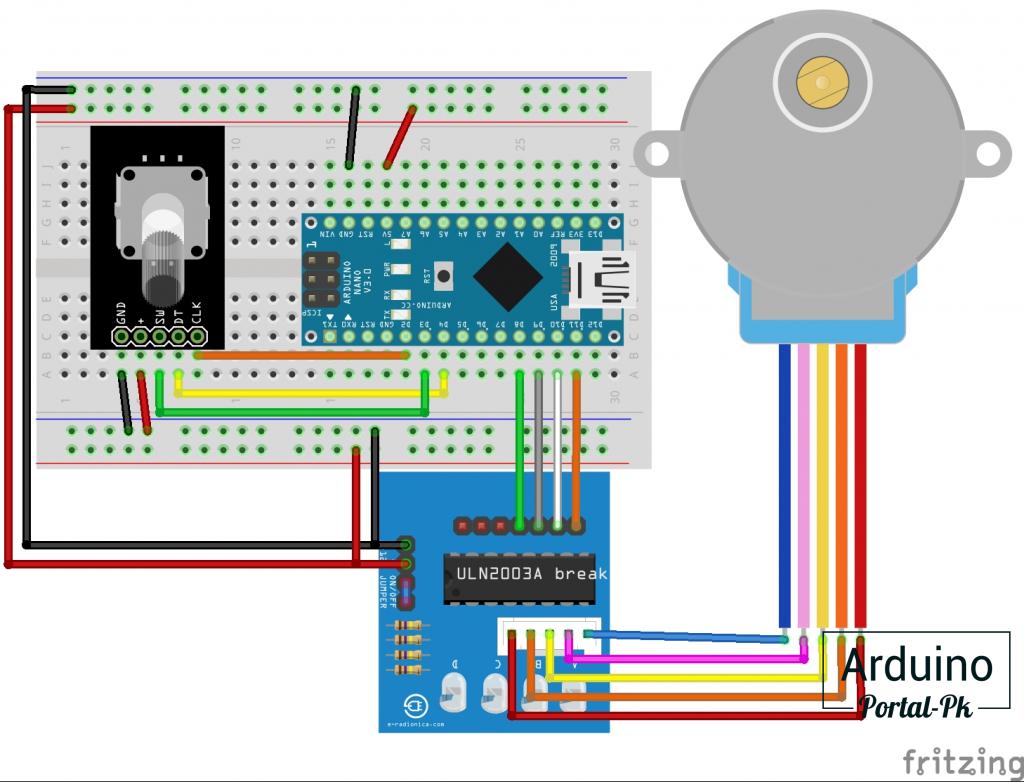
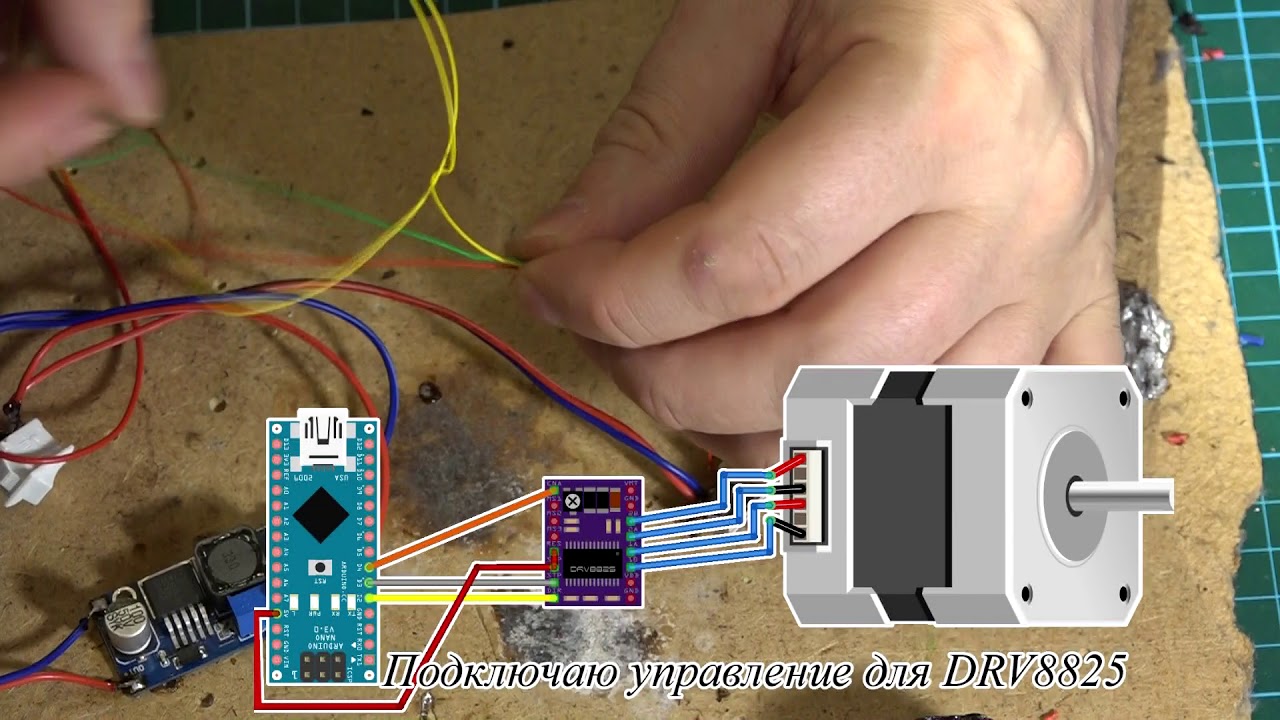
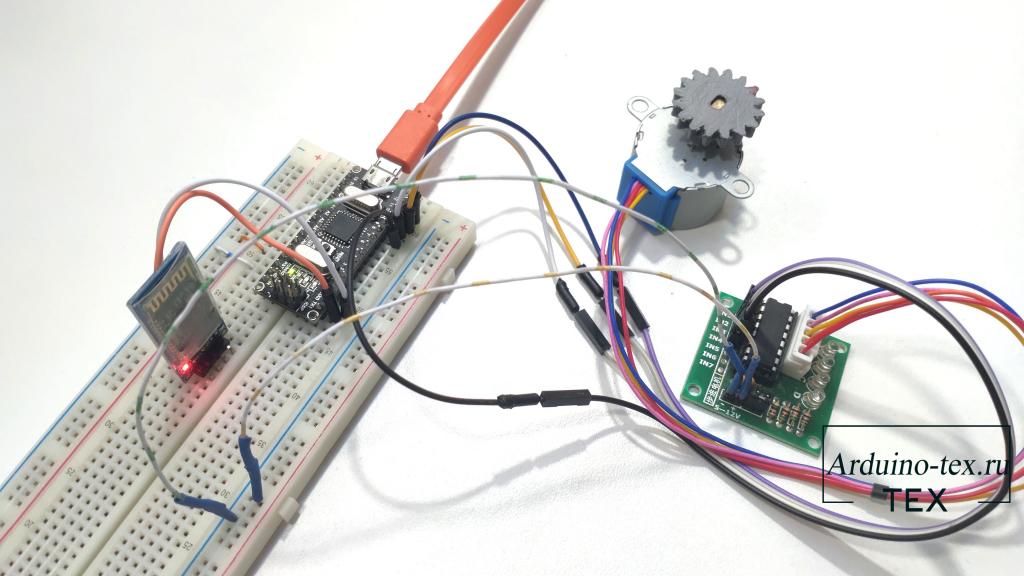
Плата Arduino Nano, инкрементальный инкрементный энкодер EC11, драйвер для шагового двигателя DRV, макетная плата, соединительные провода, и биполярный шаговый двигатель Mitsumi. После загрузки скетча для теста контактов энкодера, можно подключать энкодер к плате Arduino Nano, как показано на этой схеме. Этот вариант кода, не отключает драйвер шагового двигателя, то есть после завершения вращения продолжается подача питания на шаговый двигатель, таким образом происходит потребление энергии, но зато таким образом, вал шагового двигателя жестко удерживается.




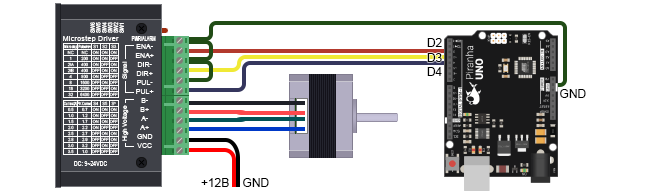



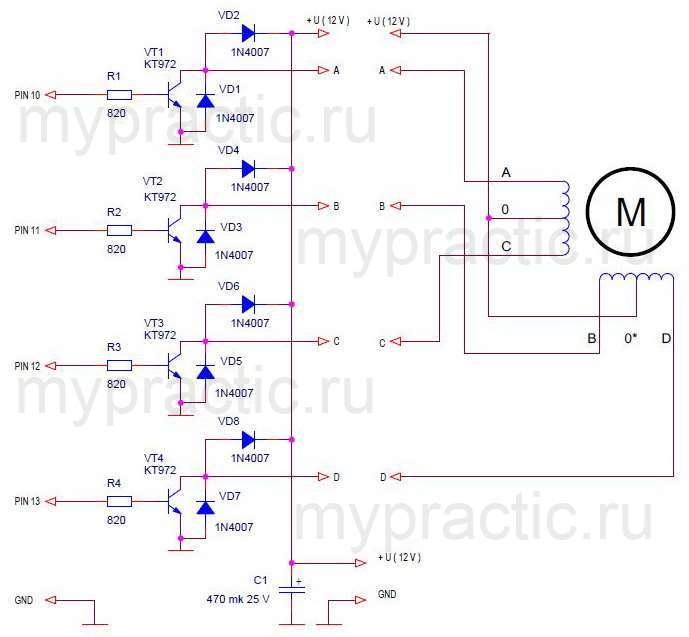
В данной статье мы продолжаем разбираться с темой шаговых двигателей. Шаговый мотор NEMA 17 — это биполярный двигатель с высоким крутящим моментом. Может поворачиваться на заданное число шагов. Биполярный двигатель имеет две обмотки, по одной в каждой фазе, которая для изменения направления магнитного поля переполюсовывается драйвером. Соответственно, от мотора отходят четыре провода.